ここから本文です。
実施内容
なにを目的にしたどんなことが行われているのかを紹介します。
このような実験を通して、アバターの社会実装が模索されています。
実験の内容は、急遽変更になる場合があります。
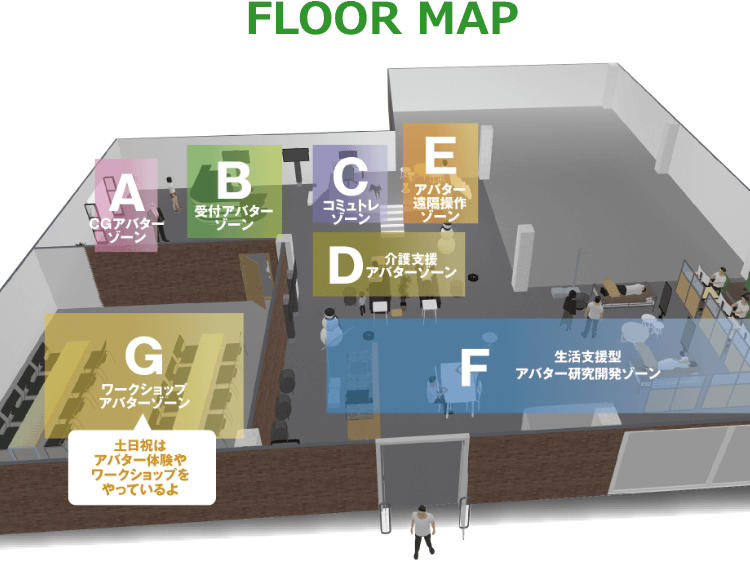
<会場>
⼤阪⼤学みらい創発hive
JAM BASE 2F
CG-CAによる街・施設の案内
話せるサイネージと一緒に街を散策しよう!
各所に設置されたデジタルサイネージにCGエージェント(CG-CA)が案内キャストとして登場し、身振り手振りを交えて施設や街の案内をします。CG-CAは、ジェネ、ウカ、ニルヴァの3種類です。遠隔操作者が不在のときは、自動で案内画像・テキストなどが流れます。CGアバターゾーンでは、操作体験や記念撮影等の体験コンテンツを提供します。

研究者紹介

李 晃伸 氏
名古屋工業大学大学院工学研究科 教授。人と機械が自然にことばでやりとりする社会の実現を目指して、音声言語理解・音声対話システム・CGエージェントの研究を行っている。音声認識エンジンJulius、音声インタラクション構築ツールキットMMDAgentの開発者。
存在感CAによるホスピタリティのある受付業務
アバターで誰でも丁寧な受付業務ができます。
実験会場の受付には、アンドロイド型アバター(存在感CA)のERICAがいます。遠隔操作機能と自動動作生成機能の組み合わせによって、簡単に丁寧な受付業務を様々な場所からできることを確かめます。(不定期に大阪・関西万博の紹介も行います)

研究者紹介

港 隆史 氏
理化学研究所 ガーディアンロボットプロジェクト インタラクティブロボット研究チーム チームリーダ(国際電気通信基礎技術研究所 石黒浩特別研究所 客員研究員 兼任)。人と自然にインタラクションできるアンドロイドロボットの実現に向けた研究を行っています。
多人数傾聴対話システム
アバターで会話をするためのトレーニングをみんなでやりましょう。
2人のユーザの発話をロボットが傾聴します。ユーザには順番に好きな話をしてもらいます。話をしていない方の人も積極的に聞き役になってもらうようにロボットが誘います。複数人で交互に傾聴対話をすることで「話す練習」と「聞く練習」の両方が体験できます。

研究者紹介
河原 達也 氏
京都大学 情報学研究科 教授。音声情報処理、特に音声認識及び対話システムに関する研究に従事。主著に「音声認識システム」「音声対話システム」(いずれもオーム社)。IEEE Fellow。情報処理学会、日本音響学会、電子情報通信学会、人工知能学会、言語処理学会、ISCA、APSIPA 各会員。日本学術会議連携会員。

井上 昂治 氏
京都大学 情報学研究科 助教。「アバター共生社会プロジェクト」では音声対話の基盤技術の研究開発を進めています。特に、会話の間(ま)に関するターンテイキング(話者交替)や相槌(「はい」や「へー」)の制御について、音声対話研究の最新技術を取り入れながら取り組んでいます。
越智 景子 氏
京都大学情報学研究科で音声対話システムの研究を行う。とくに人間同士の会話で、お互い相手に調子を合わせる現象に関心があり、それができる対話ロボットを作ることを目指している。
Divesh Lala 氏
京都大学でロボットインタラクションを研究する研究員。専門分野は対話システムで、人と自然な会話ができるロボットの開発を目指す。とくに、対話について、単に話した内容だけではなく、相槌の打ち方や話者の交替のしかた、笑いの共有といった側面にも着目している。きくロボや人間そっくりのアンドロイドERICAなど、さまざまなロボットと共に研究生活を送る。
技能特化型遠隔操作モジュールによる高機能CAとのインタラクション
「ハナちゃんとあそぼう!」&「ハナちゃんを助けよう!」
実験会場では、2つの体験ができます。1つ目は、子ども型見守り介護ロボット ハナモフロル(通称ハナちゃん)とお話ししたり、遊んだりといったインタラクションの体験。2つ目は、ハナちゃんの困りごと(認識エラー等)を解決するための遠隔対話操作のミニゲームを体験できます。誰もがCAの遠隔操作に参加し、社会に貢献できるような、「アバター共生社会」の描く未来を想像して頂けます。

研究者紹介

袖山 慶直 氏
博士(学際情報学)。ソニーグループ(株)事業開発プラットフォーム 技術開発部門 モーションAI開発部に所属。Hanamoflor PJのプロジェクトリーダーを務める。東京大学大学院稲葉研究室、(株)本田技術研究所を経て、2017年よりソニー(株)(現、ソニーグループ(株))にて、介護ロボットの研究開発とニーズ探索業務に従事。2023年4月より、ムーンショット目標1石黒PJに課題推進者として参画。日本感性工学会「かわいい感性デザイン賞」最優秀賞受賞。
複数CAの遠隔操作による来場者案内サービスの実証
たくさんのアバターが施設の色々な場所であなたをご案内します。
人とアバターを繋ぐサイバネティックアバターの基本ソフト(CA基盤)を使って、館内の様々な場所に設置されたアバターを遠隔操作し、来訪者に、施設、店舗、イベントなどを案内します。操作者1人が複数のCAを操作することで、少人数でも施設全体でサービスを提供できることを確かめます。
研究者紹介

宮下 敬宏 氏
国際電気通信基礎技術研究所 インタラクション科学研究所 所長
アバター共生社会PJ 課題推進者 アバターランド 実施責任者
サイバネティックアバターを活用して誰もが活躍できる社会を実現するための技術開発と社会制度検討を推進しています。

内海 章 氏
ATRインタラクション科学研究所 環境知能研究室 室長。「アバター共生社会プロジェクト」では人とCAを繋ぐソフトウェア基盤である“CA基盤”の研究開発を進めています。
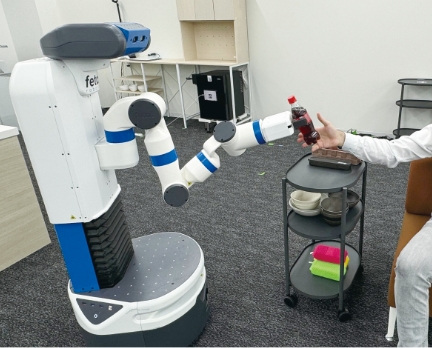
生活物理CAの研究開発
遠隔操作とAI技術の融合でより自律的なCAを実現。
家庭環境での物体操作や運搬を協調して行う生活物理支援CAの研究開発の現場をお見せします。大規模言語モデルを使ったロボットの連携やAR技術を使ったCAの拡張などを行っています。
- ●移動型/HS
- ●協働/U
- ●自律搬送型/Kachaka
- ●自律型/Fetc
研究者紹介

谷口 忠大 氏
京都大学大学院情報学研究科 教授。立命館大学 総合科学技術研究機構 教授。「アバター共生社会プロジェクト」ではCA協調連携の研究開発グループを牽引。記号創発ロボティクスの領域を推進。AI・ロボティクスの研究者。書評ゲーム「ビブリオバトル」の発案者でもある。

堀井 隆斗 氏
大阪大学大学院基礎工学研究科准教授(東京大学国際高等研究所ニューロインテリジェンス国際研究機構 協力研究員兼任)。AI技術を応用することで、ロボットの遠隔操作補助システムを含む自在CA制御技術の基盤研究開発に取り組んでいます。
<会場>
ピロティ広場(半屋外)
移動型CA Telecoによる遠隔からの施設案内業務
Telecoを自在に操作して、お客様を案内しよう!
JAM BASE ピロティ広場を、ロボットアバター Teleco(移動型CA)が自在に動き回り、店舗・トイレなど道案内や施設紹介を来訪者に提供します。Telecoを操作体験された方と、来訪者としてTelecoと対話された方のそれぞれに対して、Telecoやアバター利用に関するアンケート調査を行います。

研究者紹介

西村 祥吾 氏
株式会社国際電気通信基礎技術研究所(ATR)インタラクション技術バンクに所属する研究員です。ロボットの遠隔操作のしやすさを評価し、アバターと共生する社会の創造に向けて取り組んでいます。
異種CAの協働によるガイドサービス
ロボット同士が協力してイベント案内に挑戦!
移動型CAであるTelecoと設置型CAであるCommUが協力しておもてなしサービスを提供します。移動型Telecoは自在に動き回り、来訪者に声掛けをした後、設置型CommUやイベントの開催場所の近くまで案内します。設置型CommUはイベントや施設の詳細を丁寧にご紹介し、イベントでの楽しいひとときを倍増させるお手伝いをします。


研究者紹介

吉川 雄一郎 氏
大阪大学大学院基礎工学研究科・准教授。ロボットを用いたコミュニケーションに関する研究、特に複数のロボットと人が参加する対話、ロボットを用いた自閉症スペクトラム障害の療育の研究などに従事。
<会場>
JAM BASE
1F・2F・4F・7F・8F
※4F〜8Fは、サロン会員以外は入場できません。ご了承ください。
1人の操作者が15体の施設案内アバターを制御する実験
1人が50箇所で働ける世界を夢見て
15箇所の施設案内アバター(設置型CA、Sota)が自律的に施設案内をします。CAたちを取りまとめるAIが、操作者と対話して案内方針や知識情報の追加をまとめて各CAに伝達することで、CAたちの振る舞いが変化します。従業員とのやりとりによって日々賢くなるCAを実現します。

研究者紹介
石黒 浩 氏
大阪大学栄誉教授 ムーンショット型研究開発プロジェクト目標1 プロジェクトマネージャー、国際電気通信基礎技術研究所 石黒浩研究室 客員所長、2025年大阪・関西万博 テーマプロジェクトプロデューサー、AVITA株式会社CEO
宮下 敬宏 氏
国際電気通信基礎技術研究所 インタラクション科学研究所 所長
アバター共生社会PJ 課題推進者 アバターランド 実施責任者
サイバネティックアバターを活用して誰もが活躍できる社会を実現するための技術開発と社会制度検討を推進しています。

馬場 惇 氏
株式会社サイバーエージェント AI Lab 主任研究員/大阪大学。接客ロボット、遠隔接客の研究をしています。遠くにいる働く意欲のある人が、現地に行かずに空いた時間に働ける世界を作れるように頑張ります。
CAによる飲食店の案内
対話の状況を理解した効率的なCA
CAが飲食店の案内をします。マルチモーダル対話破綻検出技術と対話要約技術を組み合わせることで、オペレータは対話の状況を的確に理解でき、少人数で同時に多くのお客様対応が可能となります。

研究者紹介

東中 竜一郎 氏
名古屋大学大学院情報学研究科教授。言葉を通して人間とコミュニケーションする対話システムの研究をしています。自律対話システムを高度化し、人間のオペレータとシステムとの密な連携を実現することで、高度な対話サービスが提供できるように研究を進めています。
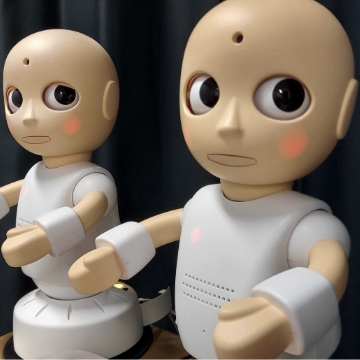
2体のCA連携による雑談機会の提供サービス
うわさCA~みんなの話を聞いてみんなに伝えます~
コンビニエンスストアのイートインスペースに配置された2台の設置型CAが利用者に話しかけ、食事や休憩をしながらCAとの会話を楽しんでいただきます。2体のCAは共感されている感覚を利用者に利用者に与えるよう、かわるがわる利用者に話しかけ、他の利用者から聞き出したストーリーを共有しながら、ユーザが人と共有したいストーリーを一生懸命聞き出します。
研究者紹介

吉川 雄一郎 氏
大阪大学大学院基礎工学研究科・准教授。ロボットを用いたコミュニケーションに関する研究、特に複数のロボットと人が参加する対話、ロボットを用いた自閉症スペクトラム障害の療育の研究などに従事。
酒井 和紀 氏
大阪大学大学院基礎工学研究科・特任助教、ロボットを用いたコミュニケーションに関する研究、特に複数のロボットを用いた自律対話システムに関する研究や、CGアバターを用いた遠隔アバター会議システムに関する研究などに従事。
アバターロボットによるモラルインタラクション
人々のより良い行動を引き出すアバターロボット技術の解明に取り組みます!
ロボットの存在が、人々のより良い行動を引き出し、安心できる社会を実現する技術の構築を向け、実験を行います。アバターロボットでは、ロボットと対話する人々と、操作するオペレータからより良い行動を引き出す仕組みを解明する必要があります。本実験では、複数のオペレータが協調することで、時に英語での案内を行う案内ロボットを構築し、本課題に取り組みます。

研究者紹介

佐竹 聡 氏
国際電気通信基礎技術研究所 深層インタラクション総合研究所 研究員。
実フィールドを中心としたヒューマンロボットインタラクションや、ロボットの開発プロセスに興味を持ち、研究を進めています。店舗での案内ロボットや店員ロボットといった商業施設でのサービスロボットの研究を行っています。